RANGKAIAN SENSOR CAHAYA MENGGUNAKAN MIKROKONTROLLER
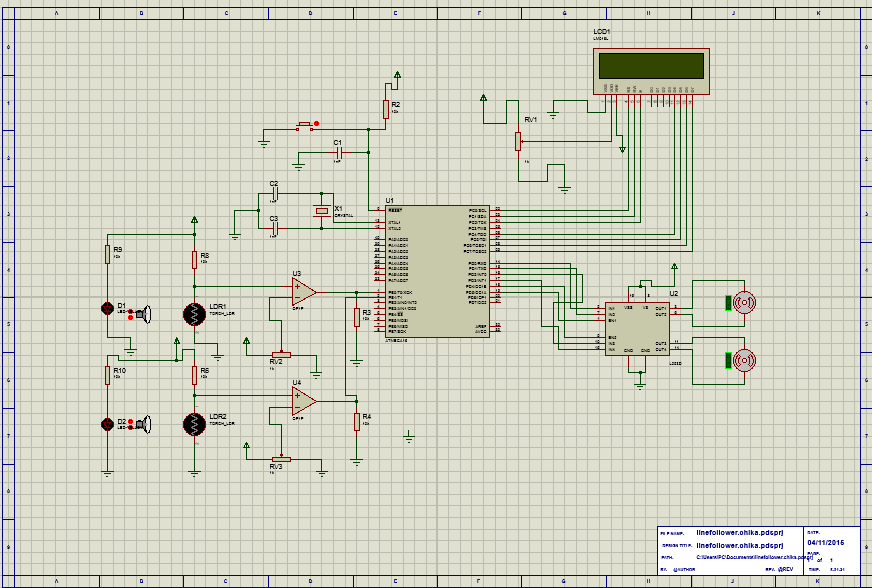
v Rangkaian Schematic Robot Line Follower
Menggunakan Mikrokontroller Atmega 16
Prinsip kerja robot
line follower berikut adalah saat sistem sensor berada di atas permukaan putih,
akan ada pantulan cahaya dari LED yang akanmengenai sensor cahaya LDR sehingga
resistansi sensor LDR berkurang sehingga arus bergerak melalui LDR. Kondisi
tersebut menyebabkan arus output sensor menuju IC komparator LM 393 menjadi
minimum, oleh IC LM 393, arus di non mikrokontroler menjadi LOW (0).
Sebaliknya, saat sistem sensor berada di atas garis hitam, tidak akan ada
pantulan cahaya dari LED akan mengenai sensor cahaya LDR sehingga resistansi
sensor LDR sangat besar sehingga arus tidak akan melalui LDR. Kondisi tersebut menyebabkan
arus output sensor menuju IC komparator LM 393 menjadi maksimum, oleh IC LM
393, arus di non output menuju pin mikrokontroler menjadi HIGH (1). Oleh mikrokontroler
data logika pin tersebut kemudian diolah untuk mengerakan motor, motor akan
bergerak jika kedua pin motor tersebut memiliki beda polaritas.
Langkah Kerja
Berikut langkah kerja untuk membuat schematic
line follower dengan proteus 8 :
1. Pertama kita harus membuka lembar kerja
schematic proteus 8 dengan mengklik shorcut proteus 8 kemudian akan muncur layar
seperti dibawah

2. Selanjutnya
pilih new project lalu pilih jenis kertas untuk lembar schematic misal landscape A3 maka akan muncul layar seperti
dibawah

3. Perbesar
lembar kerja untuk memudahkan merangkai rangkaian line follower zoom hingga
200% atau klik icon zoom pada toolbars
4. Langkah
selanjutnya adalah menambahkan beberapa komponen yang dibutuhkan dengan cara
klip tombol huruf “P” pada keyboard, ini adalah
cara cepat untuk menampilkan kotak pick device
pada menu library, kemudian ketikkan nama
komponen yang dibutuhkan pada kotak keyword

5. Komponen
yang dibutukan yaitu Atmega 16, torch – LDR, motor DC,
RES, CAP, Crystal, OP1P, L293D, Button, LM016L, POT (Device), dan LED Yellow.
6. Setelah
anda menambahkan komponen pada kotak component mode, selanjutnya anda harus
meletakkan komponen tersebut ke lembar kerja schematic
7. Untuk
meletakkan Atmega 16 dengan cara klik kanan mouse→place→pilih atmega 16

8. Lakukan
langkah yang sama untuk meletakkan komponen yang
lain
9. Selanjutnya
kita perlu menambahkan komponen tambahan yaitu ground dan power dengan cara
klik terminal mode lalu pilih ground, kemudian klik dilembar kerja. Lakukan hal yang
sama untuk menambahkan power.


10. Hubungkan semua komponen dengan menarik garis pada ujung
komponen kemudian sambungkan dengan komponen lainnya, kita tidak perlu
menambahkan junction karena, bila garis tersambung dengan benar maka junction
akan muncul sendiri.
11. Kemudian masukkan source kode atau program hex pada Atmega 16, source kode dapat
atau bisa langsung ke link sumber dipojok kanan bawah layar.
12. Pembahasan secara
lengkap tentang logika dan prinsip kerja nya dapat anda lihat di link dibawah
ini.









0 komentar:
Posting Komentar